人工肌肉测试
2025-08-28· ·
2 分钟阅读时长
·
阅读量 次
·
2 分钟阅读时长
·
阅读量 次
XIETU

我的终极目标
实现飞行是我的终极目标,它需要有强大的肌肉,就像鸟类一样有异常发达的胸肌。对于人工肌肉的构型我最早尝试的是气动执行器, 但是需要很大的气压,有一次爆炸了,很危险,我放弃了。
我不断地去了解人类肌肉收缩的原理,了解到,它是通过钙离子(Ca²⁺)改变肌球蛋白的构象,肌球蛋白头部在结合后会发生倾斜摆动, 就像划船一样,将细肌丝向粗肌丝的中央方向拖拽。看来还是使用了机械力。
后来有一天灵感一闪,想到了DNA的折叠,于是我尝试用折叠的方法来设计人工肌肉的结构。从2019年一直迭代到2023年,终于形成相对可行的方案。
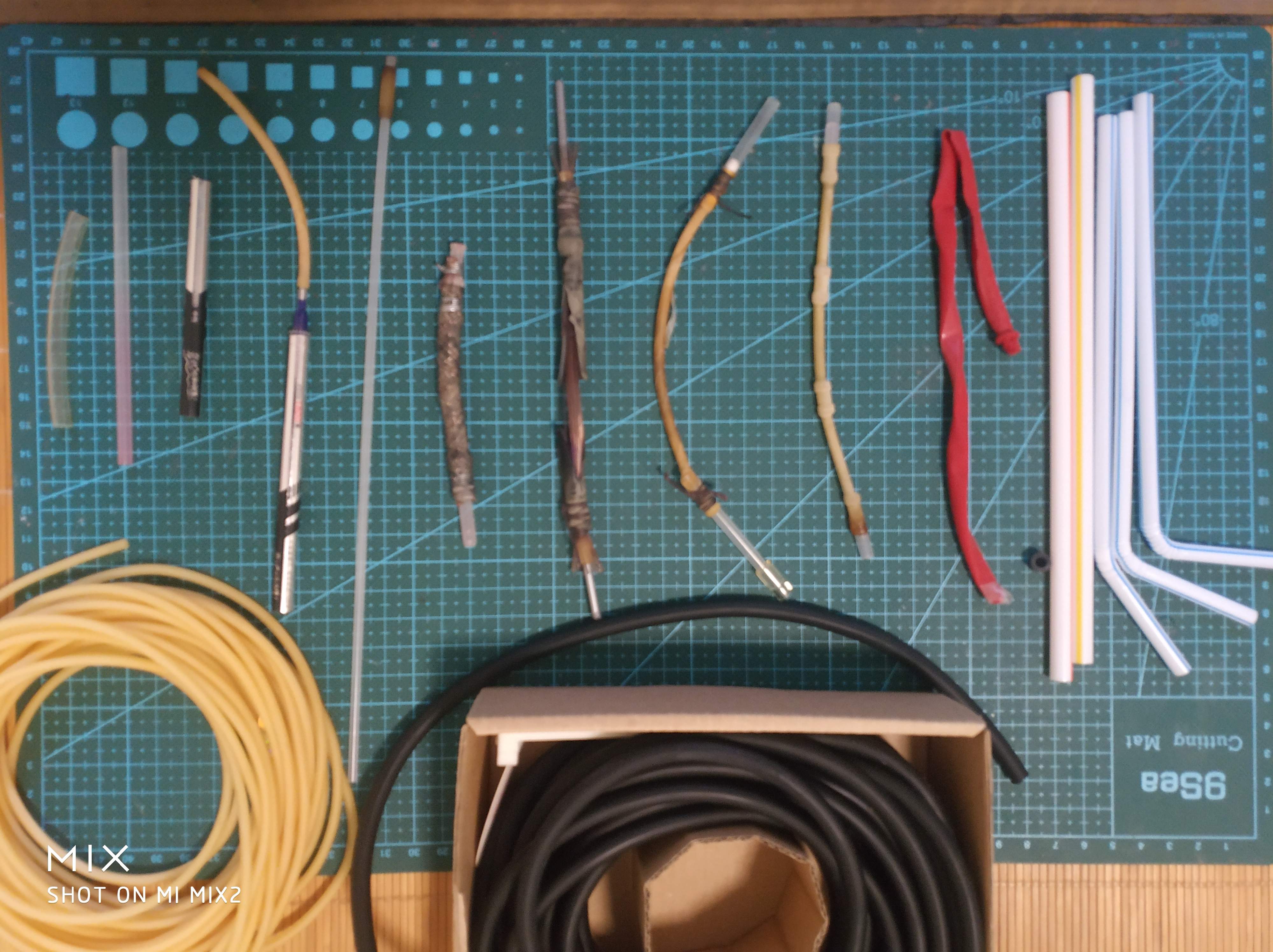
人工肌肉构造

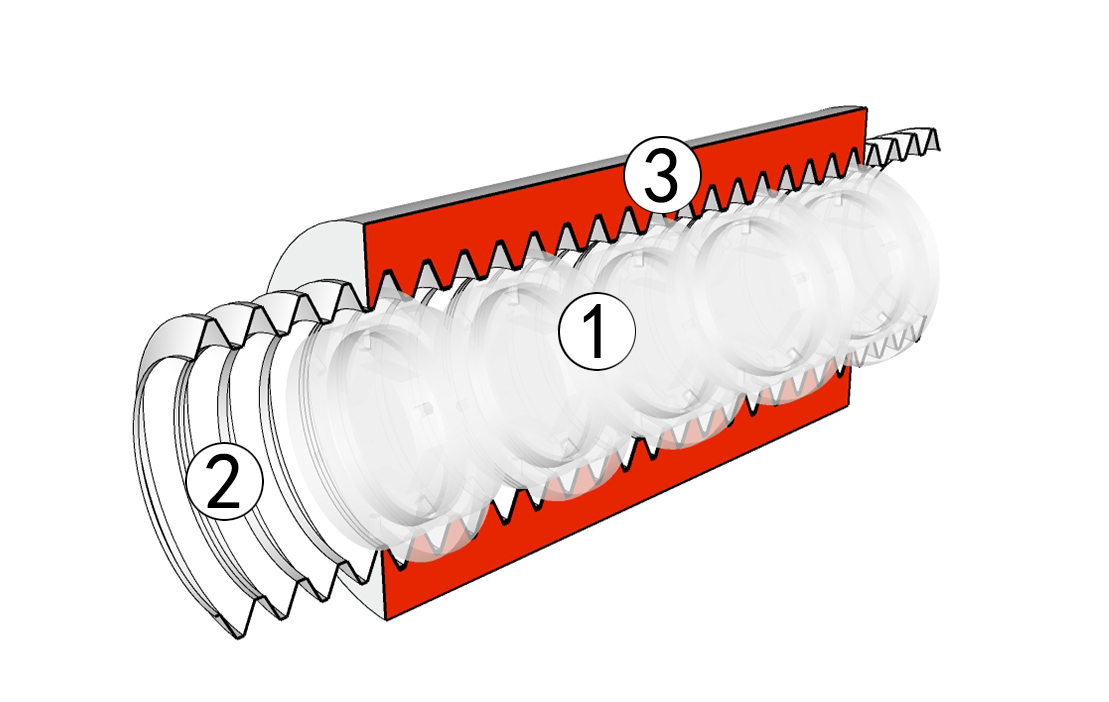
- 肌肉纤维内核:力传递和轴向伸缩部件(是个秘密),直径20毫米
- 肌肉纤维外壳:形状维持部件(PFA波纹管),内径18毫米,外径22毫米
- 肌肉纤维外覆层:接触面滑动部件(聚氨酯弹性体),厚度3毫米
有效性测试
- 主控单片机:stm32f103cbt6;点击一次用户按钮,电机转过一定角度,带动肌肉束内核收缩一定距离
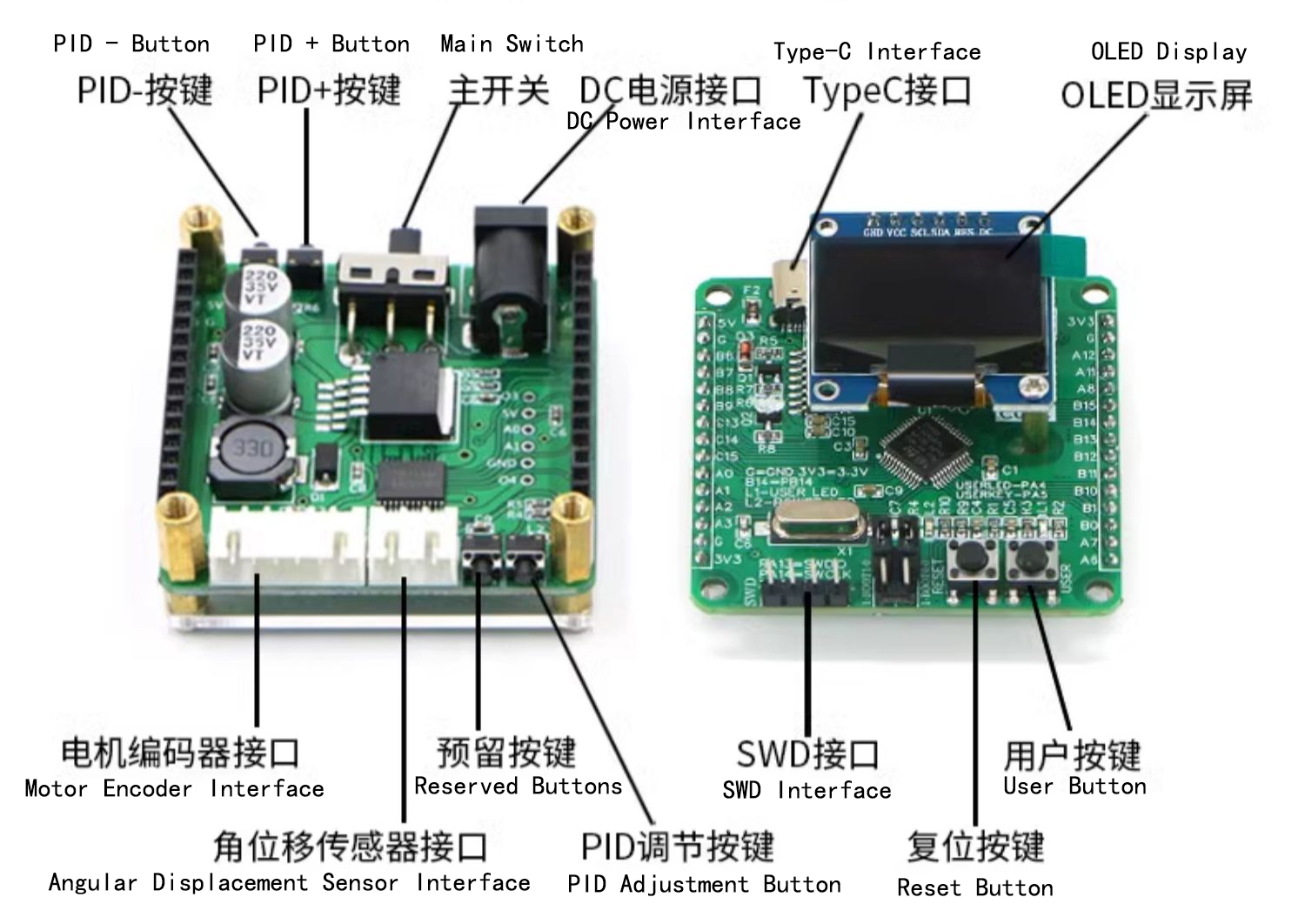
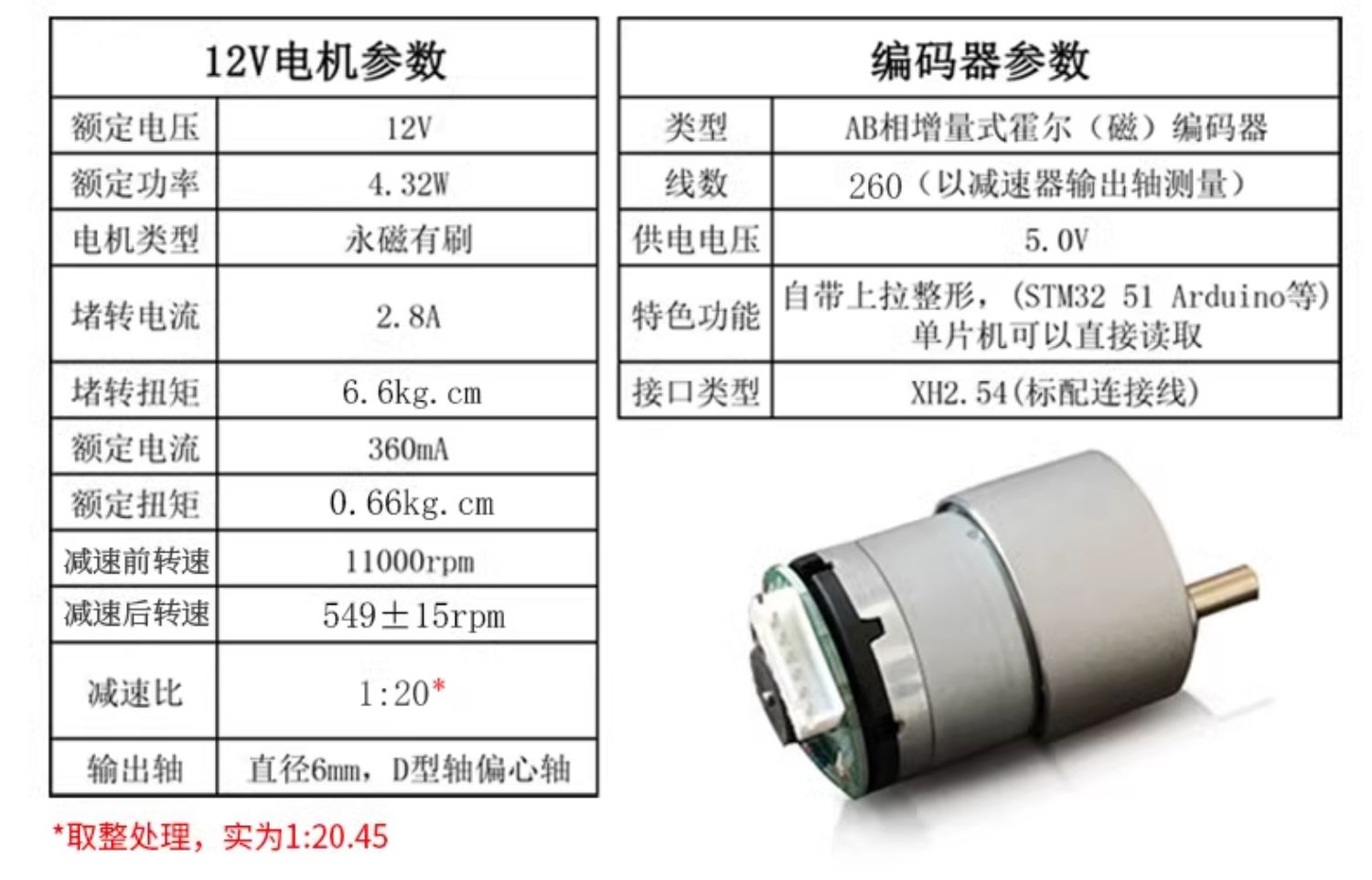
- 电机:霍尔减速电机,额定电压12伏,额定扭矩0.66kg.cm
- 负载:1.97kg多功能工具箱
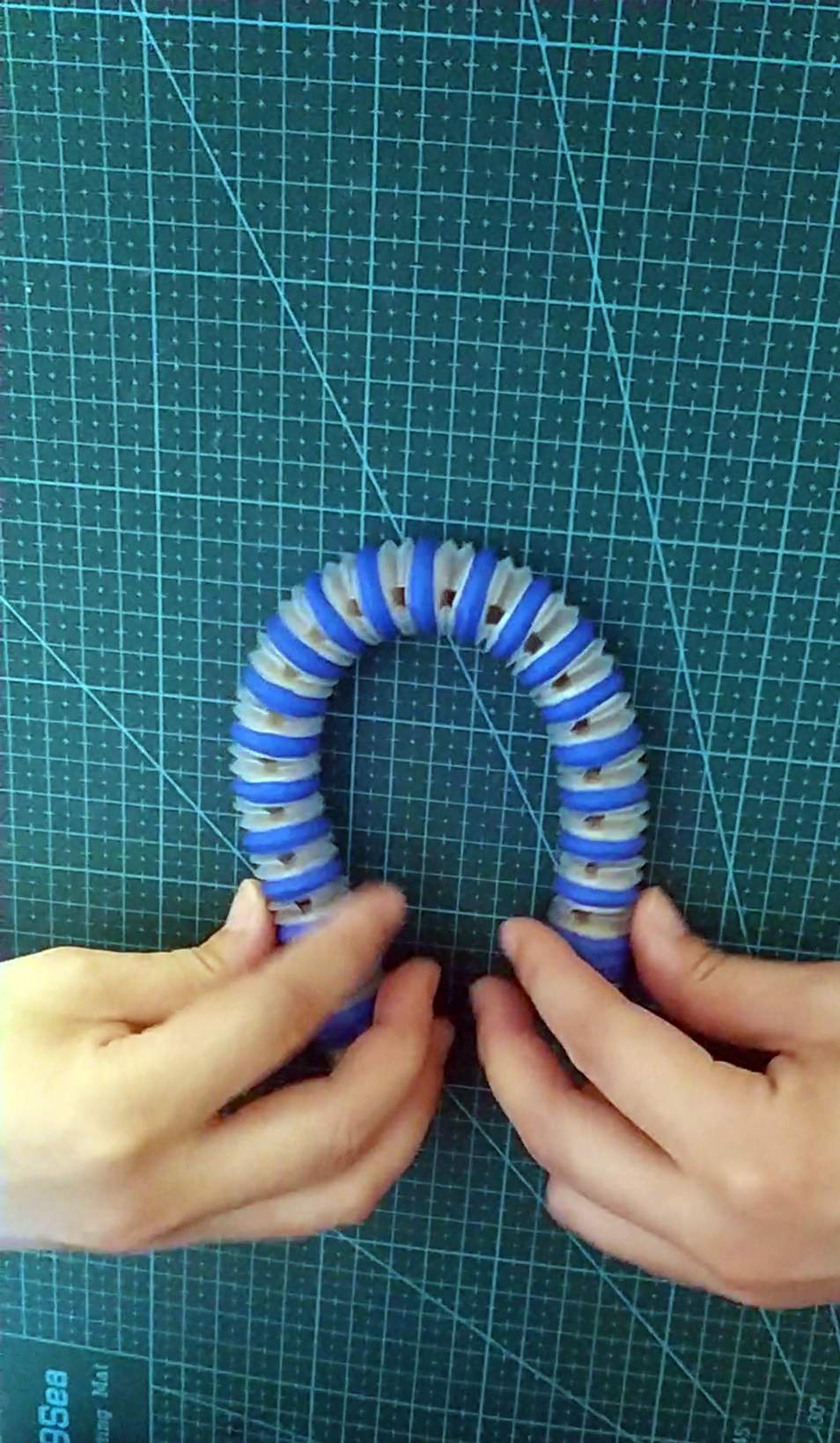
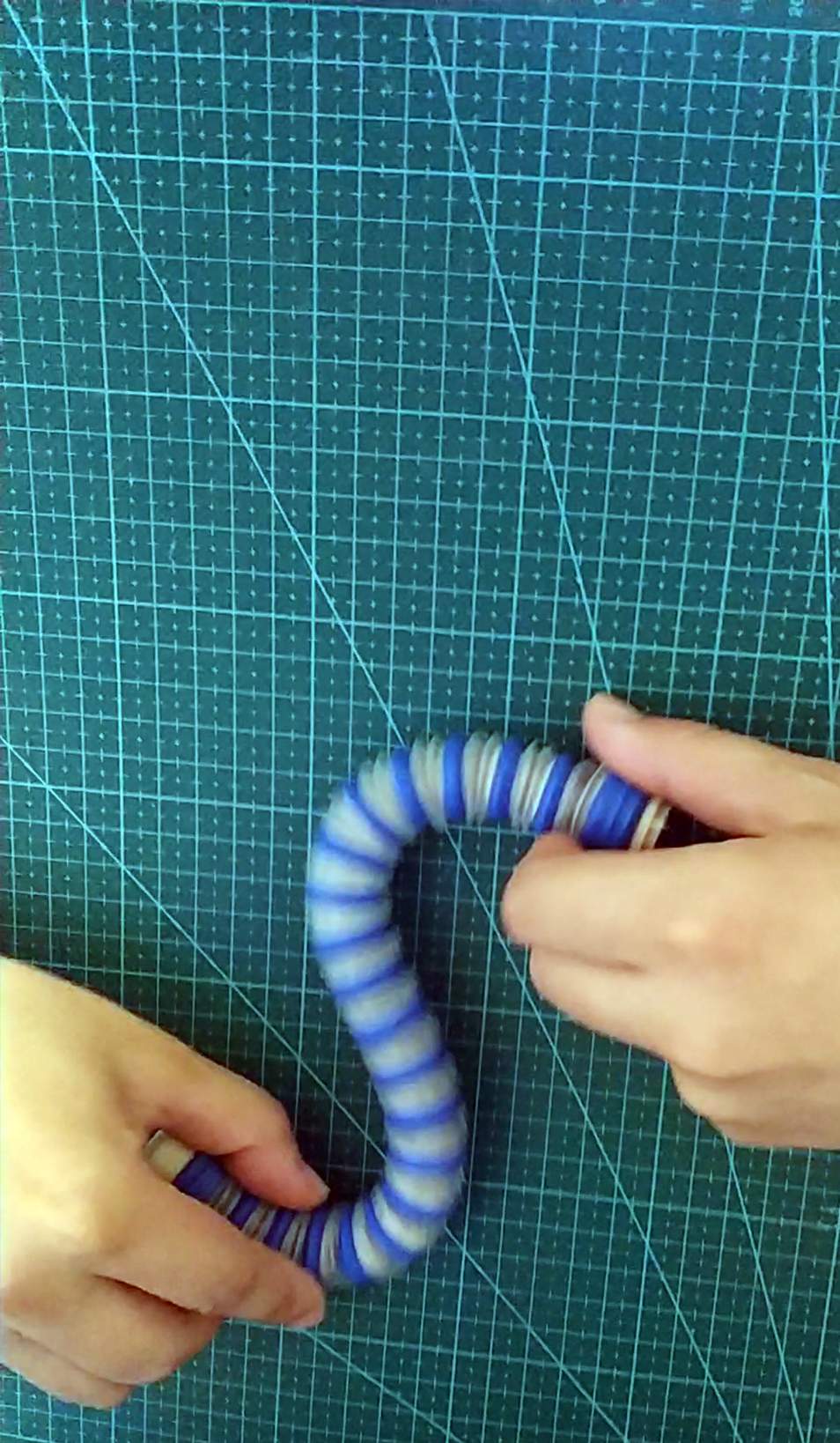
- 测试场景如下

- 测试视频
测试结果还是有效的,目测收缩率达到了25%。
模拟仿真
模拟参数
- 驱动电机参数:转速4800度/秒
- 肌肉束规格:直径5.78毫米,自然拉伸长度144.4毫米
- 恒荷载:29.4N,位于肌肉系统末端
- 材质:尼龙材料,弹性模量28.3Gpa
- 理想条件下,仅对肌肉束内核进行模拟
模拟结果
- 驱动做工6569.96Nmm(即曲线面积)
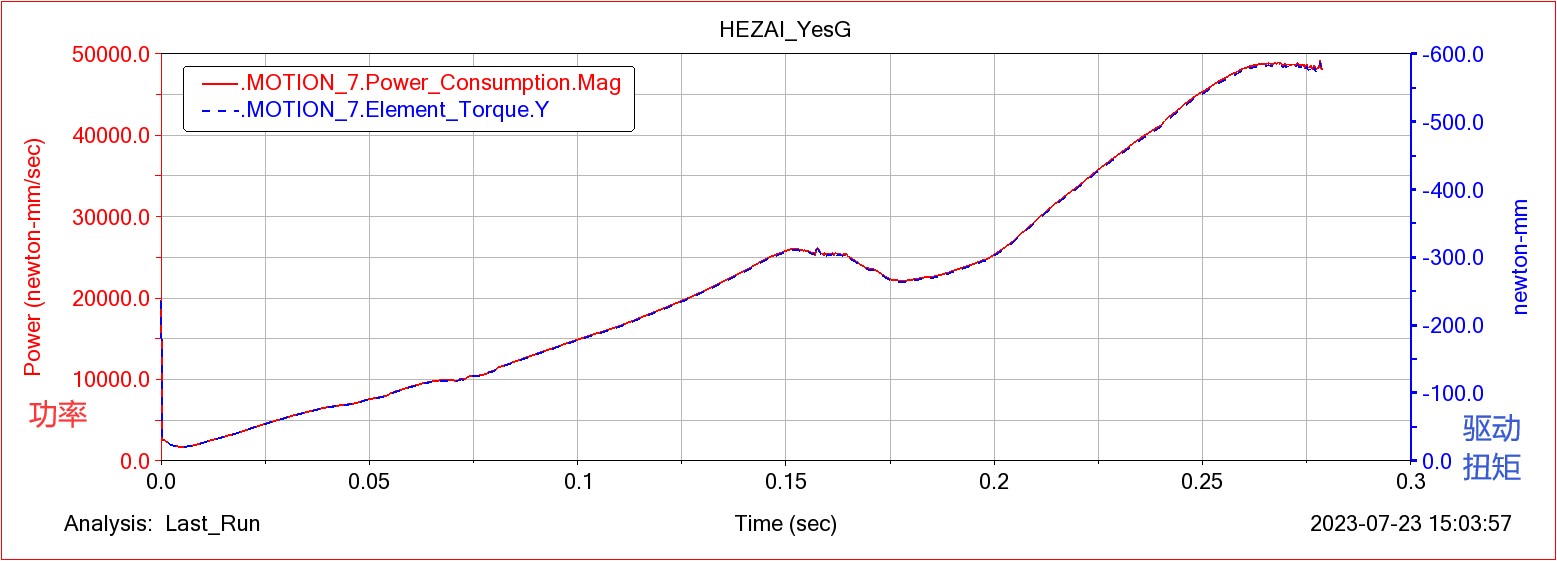
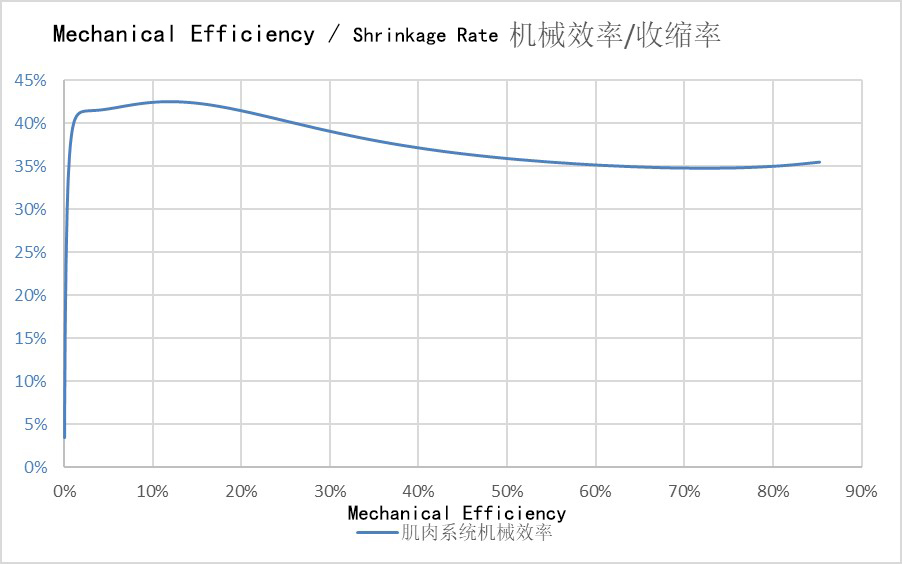
驱动的功率曲线 - 机械效率分析:
用时0.25秒,角位移1200°,肌肉系统末端上升79.28mm,对荷载做功29.4x79.28=2330.832Nmm。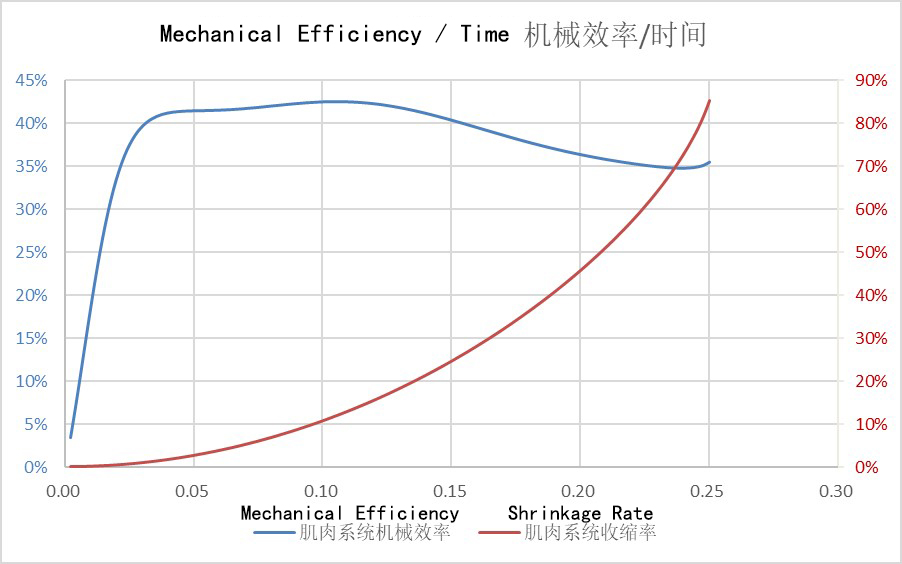
下一步
经过测试与仿真,证明此种人工肌肉构造是可行的,那么接下来就是如何实现批量制造的问题,目前我正进行这方面的探索。
请支持我坚持下去,不限额捐赠!!!

微信捐赠

支付宝捐赠