Artificial Muscle Test

My Ultimate Goal
My ultimate goal is to achieve flight, which requires powerful muscles, much like birds with exceptionally developed pectoral muscles. My earliest attempt at an artificial muscle configuration involved pneumatic actuators. However, they required extremely high air pressure, and one even exploded, which was dangerous. So, I abandoned that approach.
I continuously studied the principles of human muscle contraction and learned that it relies on calcium ions (Ca²⁺) altering the conformation of myosin. The myosin head tilts and swings after binding, much like rowing a boat, pulling the thin filaments toward the center of the thick filaments. It seems that mechanical force is still involved.
Then one day, inspired by the folding of DNA, I attempted to design the structure of an artificial muscle using a folding method. From 2019 to 2023, I iterated the design until finally arriving at a relatively feasible solution.
Artificial Muscle Structure

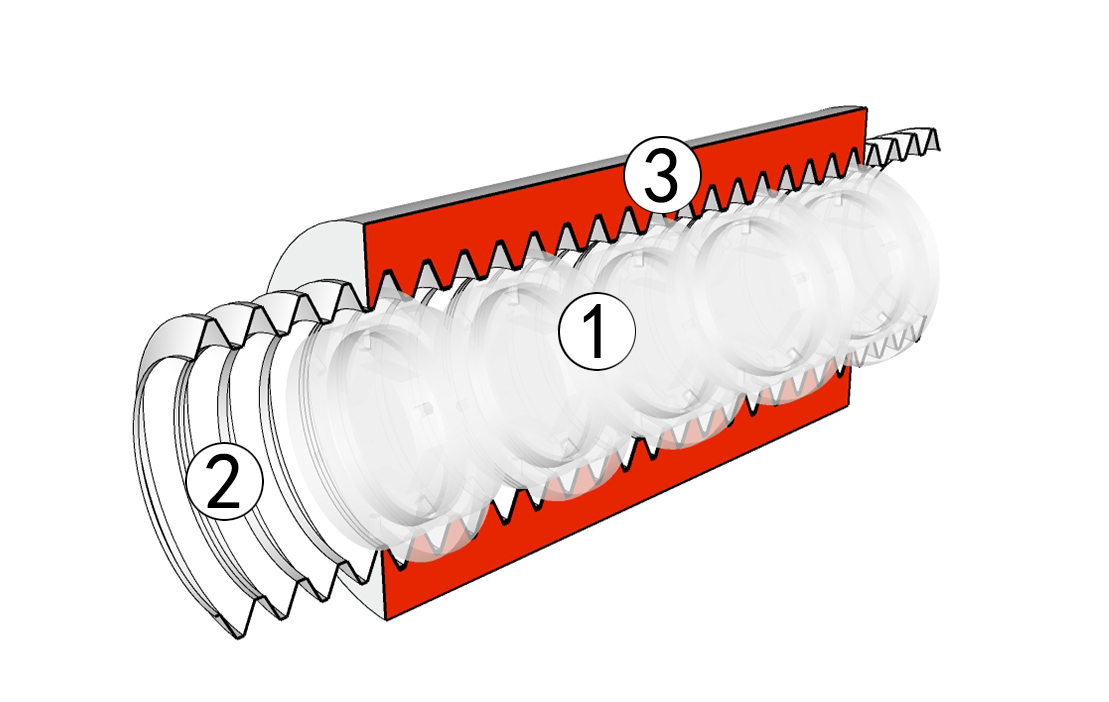
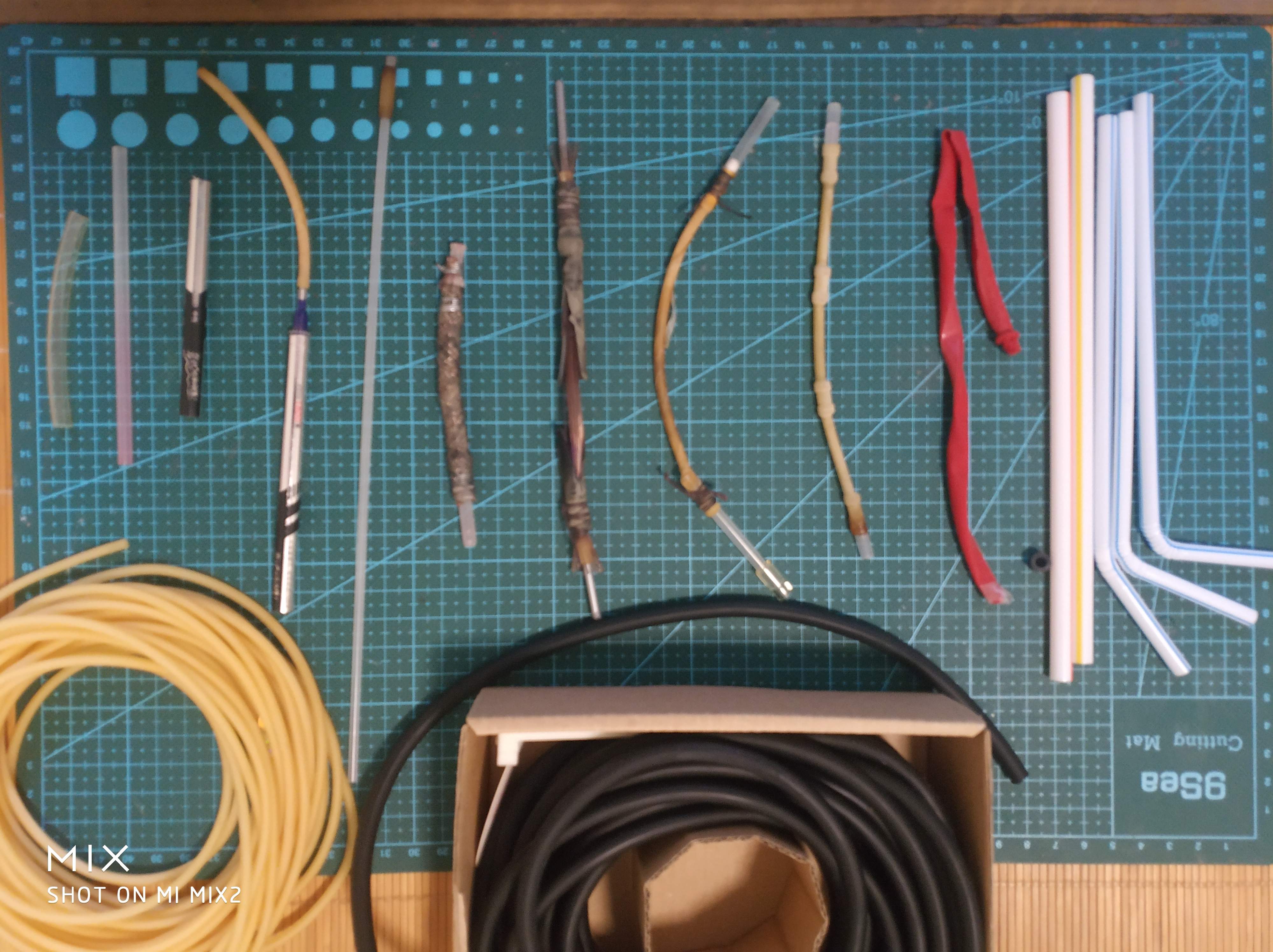
- Muscle Fiber Core: Force transmission and axial expansion/contraction component (a secret), diameter 20 mm
- Muscle Fiber Sheath: Shape-maintaining component (PFA bellows), inner diameter 18 mm, outer diameter 22 mm
- Muscle Fiber Outer Layer: Contact surface sliding component (polyurethane elastomer), thickness 3 mm
Validity Test
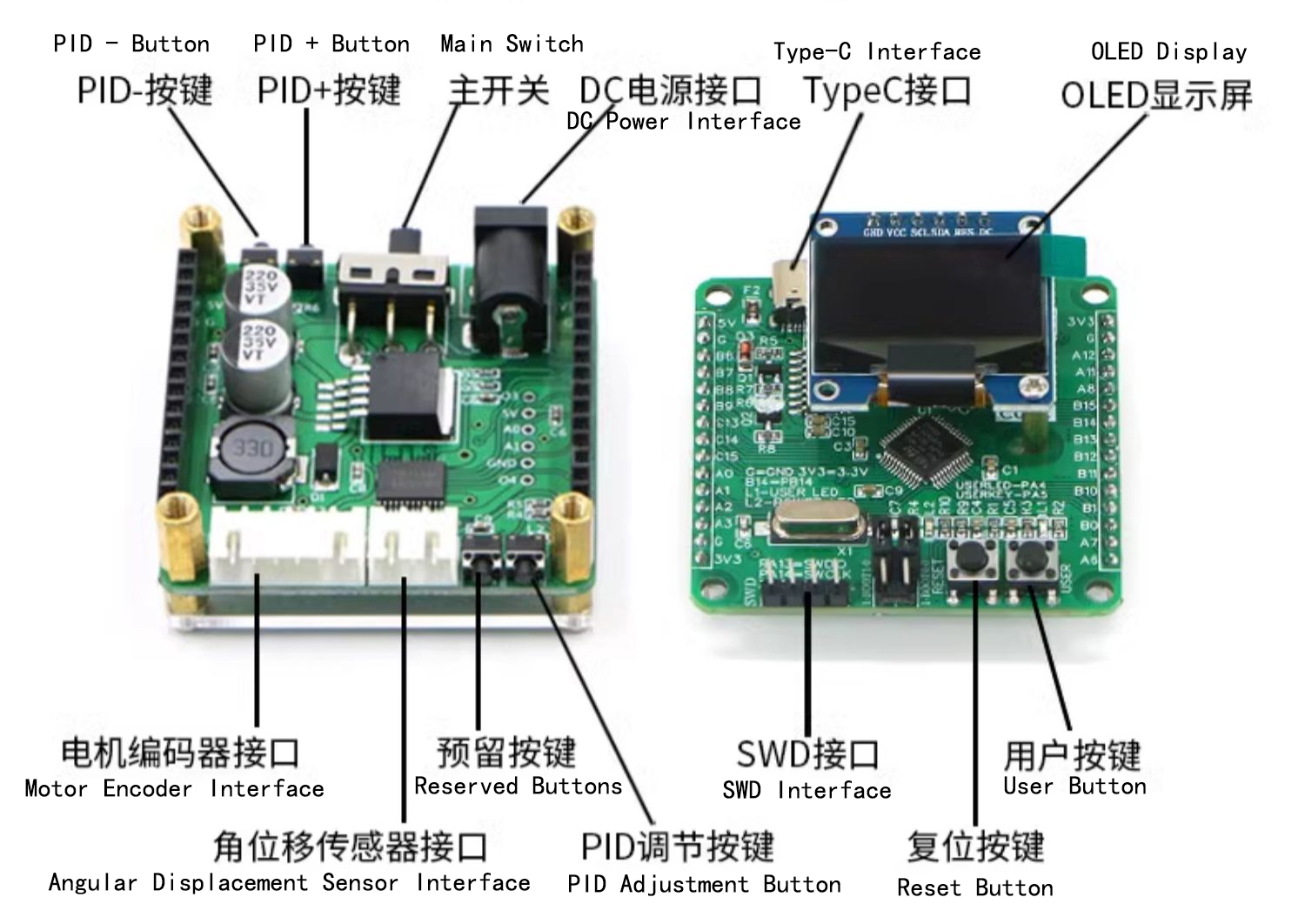
- Main Control MCU: STM32F103CBT6; each press of the user button rotates the motor a certain angle, causing the muscle bundle core to contract a specific distance.
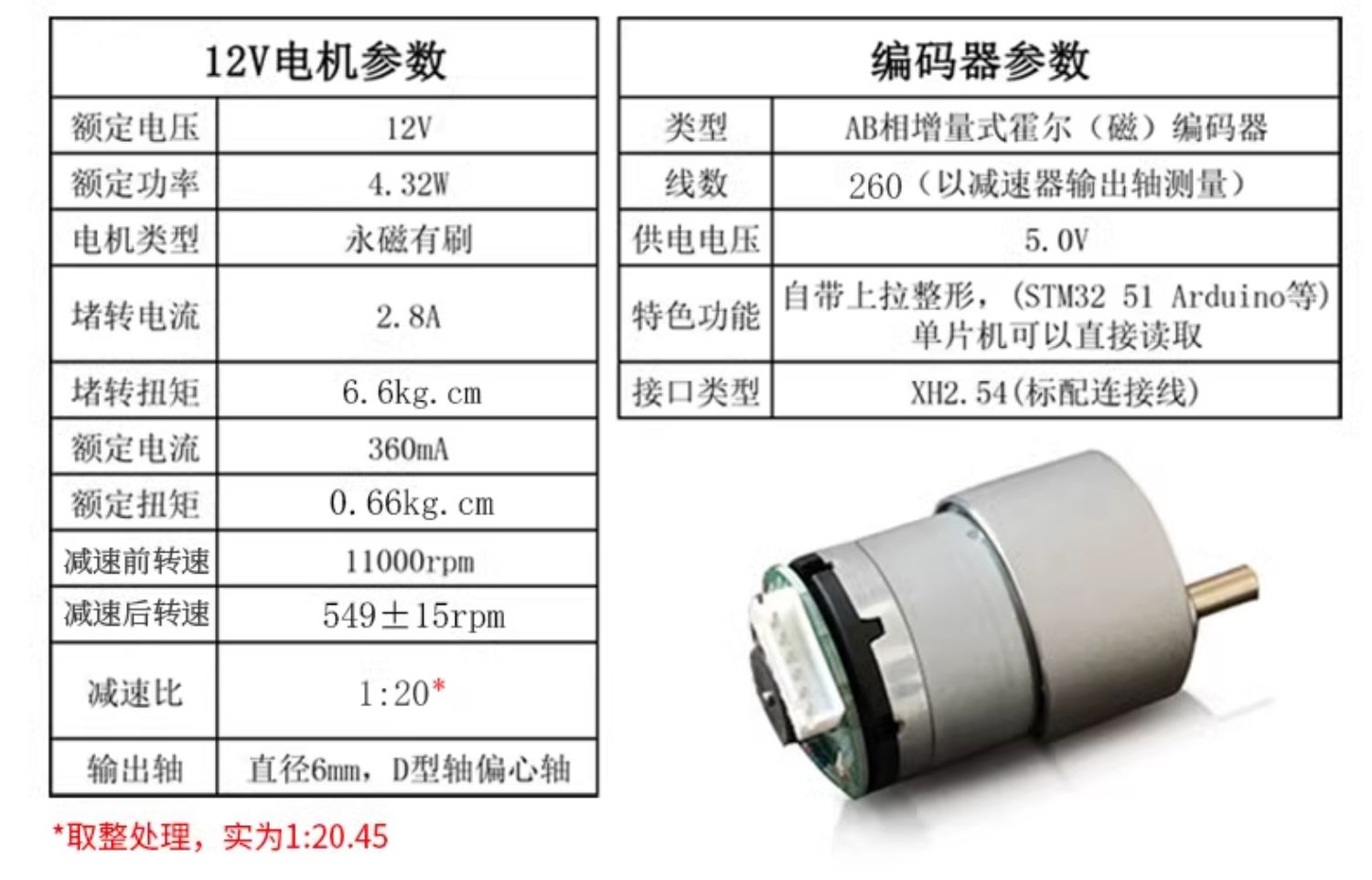
- Motor: Hall gear motor, rated voltage 12V, rated torque 0.66 kg·cm
- Load: 1.97 kg multi-functional toolbox
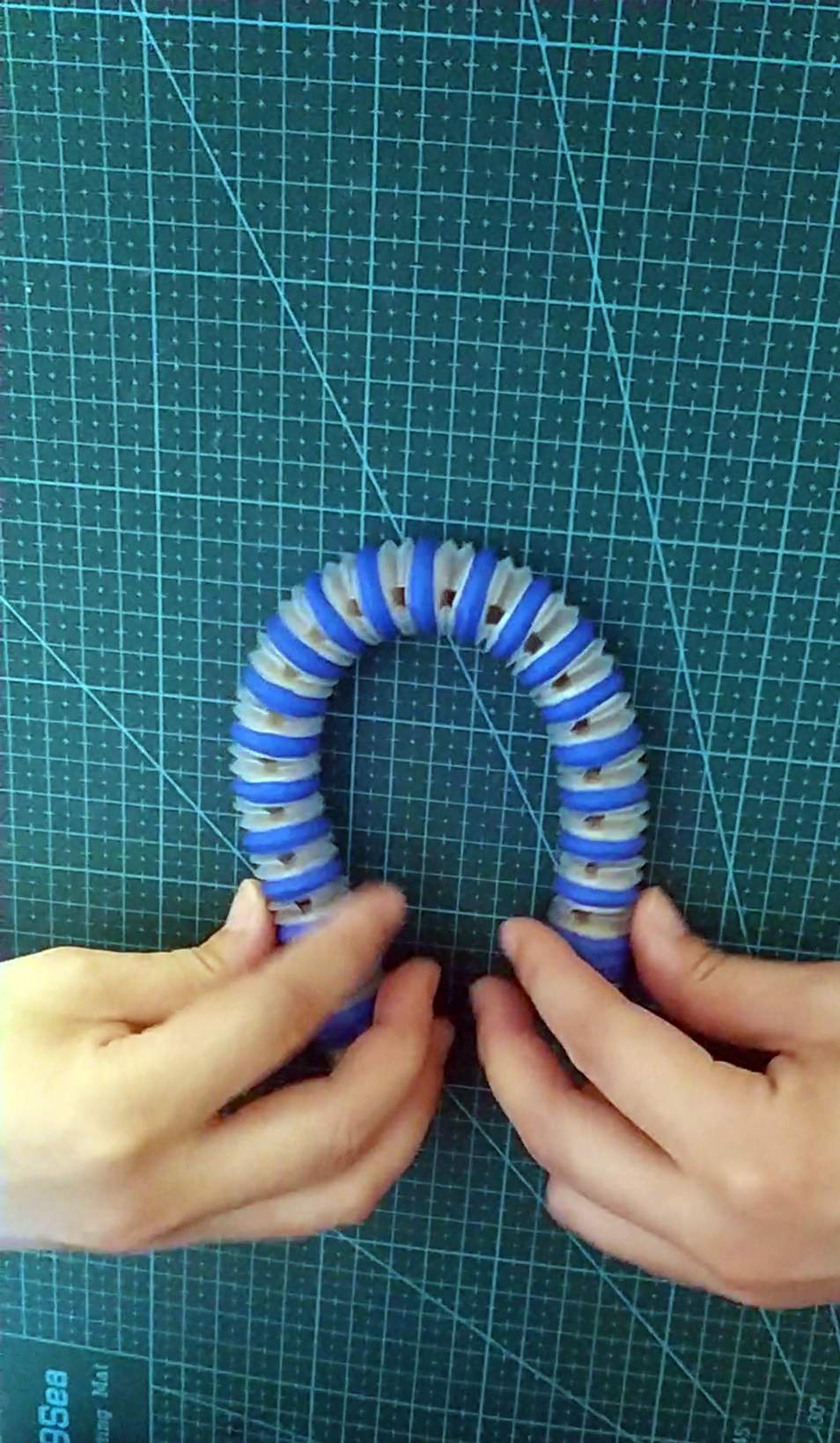
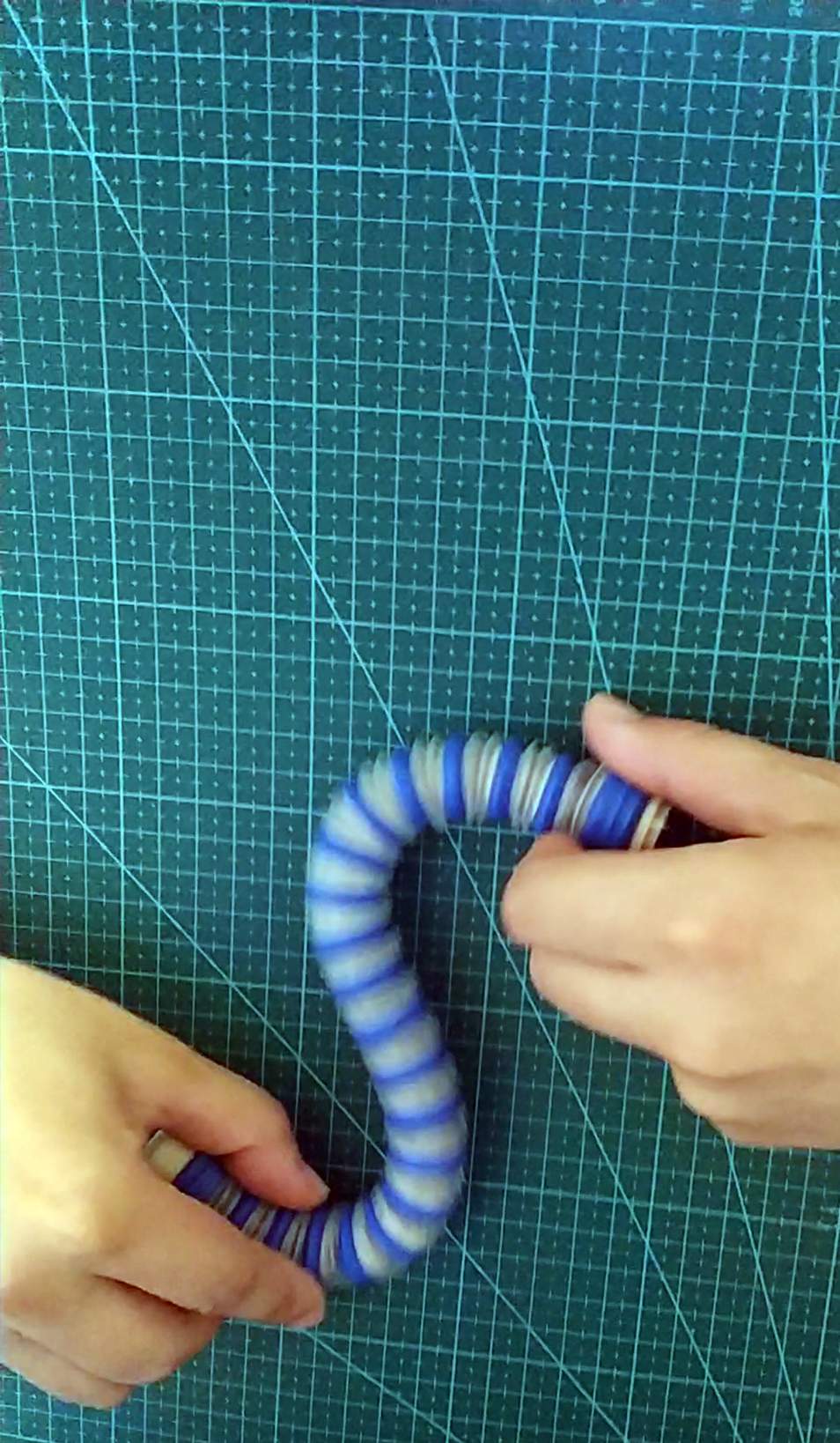
- Test scenario as shown below:

- Test Video
The test results were effective, with an observed contraction rate of 25%.
Simulation Analysis
Simulation Parameters
- Drive Motor Parameters: speed 4800 degrees/second
- Muscle Bundle Specifications: Diameter 5.78 mm, natural extended length 144.4 mm
- Constant Load: 29.4 N, located at the end of the muscle system
- Material: Nylon, elastic modulus 28.3 GPa
- Ideal conditions, simulating only the muscle bundle core
Simulation Results
- Drive Power: 6569.96 N·mm (area under the curve)
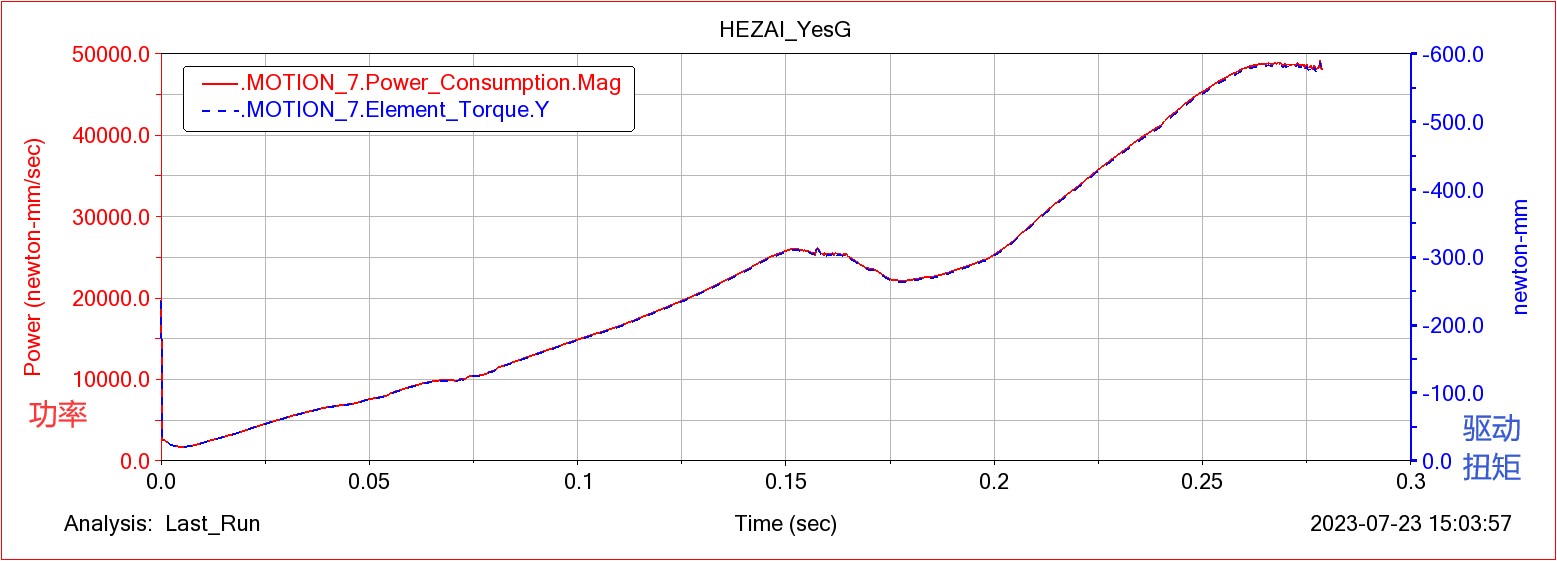
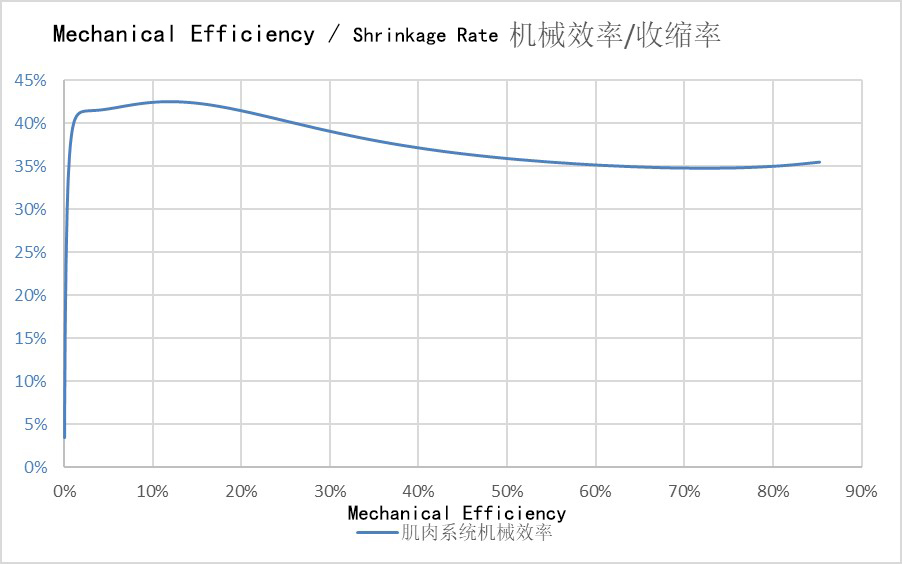
Drive Power Curve - Mechanical Efficiency Analysis:
Time: 0.25 seconds, angular displacement 1200°, end of the muscle system raised 79.28 mm, work done on the load: 29.4 × 79.28 = 2330.832 N·mm.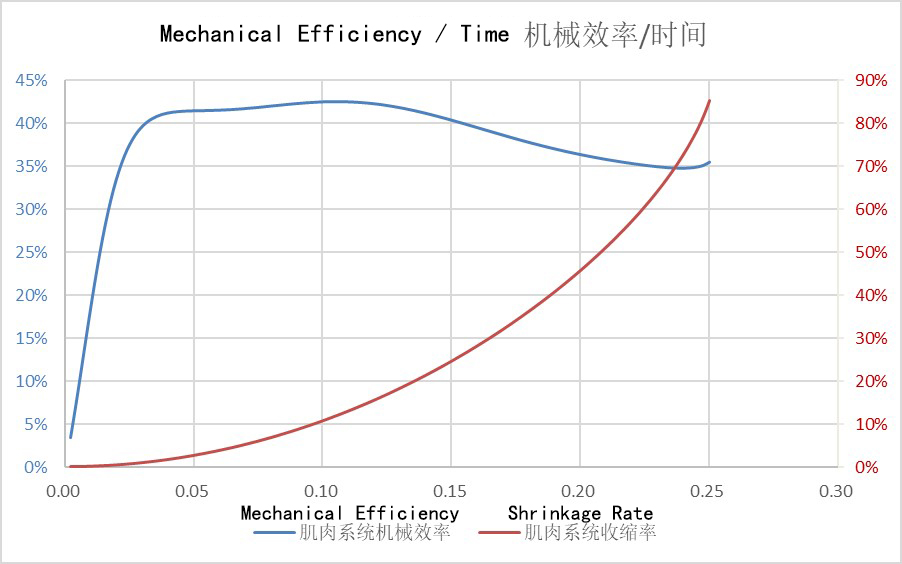
Next Steps
Testing and simulation have proven the feasibility of this artificial muscle structure. The next challenge is how to achieve mass production, which is what I am currently exploring.